1 GPIO相关¶
1.1 GPIO操作和调试方法¶
1.1.1 RTT driver层操作方法¶
思澈系列MCU为双核架构,Hcpu包含了PA口,Lcpu包含了PB口,58,56系列还包含了低功耗IO:PBR口
为了便于RTT操作系统统一操作GPIO口,目前PA,PB口,以及PBR口在RTThread操作系统的pin设备操作上,采用统一GPIO编排方式:
PA01即对应1, PA78对应78,
PB口加上96,即PB0对应96,PB1对应97, PB40对应136
PBR0口加上160,即PBR0对应160,PBR1,对应161, PBR2对应162
PA,PB,PBR可以采用函数GET_PIN或者GET_PIN_2获取pin号,
GET_PIN函数的第一个参数是0,1,2,分别对应PBR,GPIO1(PA)和GPIO2(PB),
例如
pin_numble=GET_PIN(0, 0);//PBR0 对应值为160
PBR1就是GET_PIN(0, 1)=161,
PB1就是GET_PIN(2, 1)=97,
PA1就是GET_PIN(1, 1)=1
GET_PIN_2的第一个参数是hwp_pbr,hwp_gpio1,hwp_gpio2,
pin_numble=GET_PIN_2(hwp_pbr,1); //PBR1 值为161
pin_numble=GET_PIN_2(hwp_gpio2,1); //PB1 值为97
pin_numble=GET_PIN_2(hwp_gpio1,1); //PA1 值为1
通过统一GPIO编排之后,就可以按照通用接口操作IO,操作代码如下:
rt_pin_mode(160, PIN_MODE_OUTPUT); /* 配置PBR0输出 */
rt_pin_write(160, PIN_LOW); /* PBR0输出低电平 */
rt_pin_mode(160, PIN_MODE_INPUT_PULLUP); /* 配置PBR0为输入口,注意此处配置上下拉,目前代码没有生效,需用HAL函数配置 */
if (1 == rt_pin_read(160)) /* 读PBR0状态 */
//
rt_pin_mode(78, PIN_MODE_OUTPUT); /* 配置PA78输出 */
rt_pin_write(78, 0);/* PA78 输出低 */
//
rt_pin_mode(79, PIN_MODE_INPUT_PULLUP);/* 配置PA79为输入口,注意此处配置上下拉,目前代码没有生效,需用HAL函数配置 */
if (1 == rt_pin_read(79)) /* 读PA79状态 */
配置为中断输入方式:
rt_pin_mode(144, PIN_MODE_INPUT_PULLUP);//配置PB48为输入口(48+96=144),注意此处配置上下拉,目前代码没有生效,需用HAL函数配置
curr_state = rt_pin_read(144); /* 读 PB48口状态 */
rt_pin_attach_irq(144, PIN_IRQ_MODE_FALLING, chsc5816tp_irq_handler, RT_NULL);/*配置为下降沿触发,中断函数为chsc5816tp_irq_handler */
rt_pin_irq_enable(144, 1);/* 启动 PB48 GPIO中断*/
//
rt_pin_mode(160,PIN_MODE_INPUT); //配置PBR0为输入模式,注意此处配置上下拉,目前代码没有生效,需用HAL函数配置
rt_pin_attach_irq(160,PIN_IRQ_MODE_FALLING,(void*)bt5376a_wakeup_event_handle, (void*)(rt_uint32_t)160); //配置为下降沿中断和中断处理函数bt5376a_wakeup_event_handle
rt_pin_irq_enable(160,1); //使能中断
注意:
1,DRV层函数不能修改GPIO的Funtion,需要用HAL层函数,默认在芯片上电或者standby醒来过程中,pin初始化BSP_PIN_Init函数内设置;
2,Hcpu可以完全操作Lcpu的资源,包括PB口,但是Lcpu不能直接读写PA口,否则会出现Hardfault;
3,采用pin的设备读写操作前,需要rt_pin_mode先设置mode,hal层设置了输入输出也不行;
4,采用RTT层操作GPIO,进入Standby休眠后,IO状态已经做了自动备份和恢复,备份函数pm_pin_backup();恢复函数pm_pin_restore();,执行HAL_HPAON_DISABLE_PAD();后,此时操作GPIO,GPIO对外输出电平也会保持不变,执行HAL_HPAON_ENABLE_PAD();后,GPIO和pinmux的寄存器配置就会输出到外部GPIO;Deep休眠GPIO状态会保持,不会变;
5,RTT层的GPIO操作,也可以参考RTT官网:
PIN设备 (rt-thread.org):

1.1.2 HAL层操作方法¶
在RTT操作系统还没起来时,比如drv_io.c的底层可以直接调用HAL接口的GPIO函数读写GPIO口
PA/PB口操作方法:
设置PA/PB功能和上下拉函数,PA/PB需用一个参数来区分:
HAL_PIN_Set(PAD_PA03,GPIO_A3,PIN_NOPULL, 1); //设置PA03为GPIO模式,无上下拉
输出高低:
BSP_GPIO_Set(3, 0, 1); //PA03输出低
BSP_GPIO_Set(3, 0, 0); //PB03输出低
GPIO配置为输入输出方式,PA24配置为输入模式如下图:
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pin = 24;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(hwp_gpio1, &GPIO_InitStruct);
读取IO数值:
int value;
value = HAL_GPIO_ReadPin((GPIO_TypeDef *)hwp_gpio1, 48); //读PA48的值:
value = HAL_GPIO_ReadPin((GPIO_TypeDef *)hwp_gpio2, 48); //读PB48的值:
注意:
1,HAL层操作GPIO,要参数来区分hcpu和lcpu,因此不能再用DRV层把PB48 当作96+48来操作;
2,HAL层操作GPIO,进入Standby休眠后,IO状态已经做了自动备份和恢复,备份函数pm_pin_backup();恢复函数pm_pin_restore();,执行后HAL_HPAON_DISABLE_PAD();后GPIO对外输出电平会保持不变,执行HAL_HPAON_ENABLE_PAD();后,GPIO和pinmux的寄存器就会输出到外部GPIO;
PBR口操作方法:
HAL_PBR_ConfigMode(2,1);//配置PBR2为输出模式,第1个参数0对应PBR0, 2对应PBR2;第2个参数,1为输出,0位输入;
HAL_PBR_WritePin(2,1); //配置PBR2输出高
value=HAL_PBR_ReadPin(0); //读取PBR0的值,返回0或者1,返回值少于1表示有错误,比如输入pin为无效值
HAL_PIN_Set_Analog(PAD_PBR1, 0); //设置PBR1为模拟输入,对外为高阻态
HAL_PIN_Set(PAD_PBR1, PBR_GPO, PIN_NOPULL, 0); //配置PBR1为GPIO模式
具体各个IO支持哪些function,查看文件bf0_pin_const.c中pin_pad_func_hcpu或者硬件文档SF32LB5XX_Pin config_X.xlsx

注意:
PBR0默认是在PWR_REQ模式上,这个模式是硬件自动控制输出电平的高和低,LCPU醒的时候输出高,睡的时候输出低, 所以当有的板子用这个PIN控制大核PSRAM或者NOR的供电时,就要FORCE输出高了,以免小核睡了后,PSRAM掉电,操作如下:
HAL_PBR0_FORCE1_ENABLE();
1.1.3 寄存器操作GPIO方法¶
下面是直接操作GPIO寄存器PA24输出高、低、翻转:(需预先配置好GPIO输出状态),寄存器含义参照芯片手册
#define PM_DEBUG_PIN_HIGH() ((GPIO1_TypeDef *)hwp_gpio1)->DOSR0 |= (1UL << 24)//PA00 - PA31
#define PM_DEBUG_PIN_LOW() ((GPIO1_TypeDef *)hwp_gpio1)->DOCR0 |= (1UL << 24)
#define PM_DEBUG_PIN_TOGGLE() ((GPIO1_TypeDef *)hwp_gpio1)->DOR0 ^= (1UL << 24)
下面是寄存器操作IO初始化和读写操作的示例:
pin_test为测试程序:
#ifdef SOC_BF0_HCPU
#define PA_HIGH(port) (port > 31) ? (((GPIO1_TypeDef *)hwp_gpio1)->DOR1 |= (1UL << (port-32))) : (((GPIO1_TypeDef *)hwp_gpio1)->DOR0 |= (1UL << port))
#define PA_LOW(port) (port > 31) ? (((GPIO1_TypeDef *)hwp_gpio1)->DOR1 &= (~(1UL << (port-32)))) : (((GPIO1_TypeDef *)hwp_gpio1)->DOR0 &= (~(1UL << port)))
#define PA_TOGGLE(port) (port > 31) ? (((GPIO1_TypeDef *)hwp_gpio1)->DOR1 ^= (1UL << (port-32))) : (((GPIO1_TypeDef *)hwp_gpio1)->DOR0 ^= (1UL << port))
#define PA_VALUE(port) (port > 31) ? (((GPIO1_TypeDef *)hwp_gpio1)->DIR1 &= (1UL << (port-32))) : (((GPIO1_TypeDef *)hwp_gpio1)->DIR0 &= (1UL << port))
#define PA_INIT(port,mode) \
do \
{ \
GPIO_InitTypeDef GPIO_InitStruct; \
GPIO_InitStruct.Mode = mode; \
GPIO_InitStruct.Pin = port; \
GPIO_InitStruct.Pull = GPIO_NOPULL; \
HAL_PIN_Set(PAD_PA00+port, GPIO_A0+port, PIN_NOPULL, 1); \
HAL_GPIO_Init(hwp_gpio1, &GPIO_InitStruct); \
} \
while (0)
#ifndef SF32LB52X
#define PB_HIGH(port) (port > 31) ? (((GPIO2_TypeDef *)hwp_gpio2)->DOR1 |= (1UL << (port-32))) : (((GPIO2_TypeDef *)hwp_gpio2)->DOR0 |= (1UL << port))
#define PB_LOW(port) (port > 31) ? (((GPIO2_TypeDef *)hwp_gpio2)->DOR1 &= (~(1UL << (port-32)))) : (((GPIO2_TypeDef *)hwp_gpio2)->DOR0 &= (~(1UL << port)))
#define PB_TOGGLE(port) (port > 31) ? (((GPIO2_TypeDef *)hwp_gpio2)->DOR1 ^= (1UL << (port-32))) : (((GPIO2_TypeDef *)hwp_gpio2)->DOR0 ^= (1UL << port))
#define PB_VALUE(port) (port > 31) ? (((GPIO2_TypeDef *)hwp_gpio2)->DIR1 &= (1UL << (port-32))) : (((GPIO2_TypeDef *)hwp_gpio2)->DIR0 &= (1UL << port))
#define PB_INIT(port,mode) \
do \
{ \
GPIO_InitTypeDef GPIO_InitStruct; \
GPIO_InitStruct.Mode = mode; \
GPIO_InitStruct.Pin = port; \
GPIO_InitStruct.Pull = GPIO_NOPULL; \
HAL_PIN_Set(PAD_PB00+port, GPIO_B0+port, PIN_NOPULL, 0); \
HAL_GPIO_Init(hwp_gpio2, &GPIO_InitStruct); \
} \
while (0)
#endif
int pin_test(int argc, char **argv)
{
char i;
uint8_t pin,value;
if (argc > 1)
{
pin = strtoul(argv[3], 0, 10);
value = strtoul(argv[4], 0, 10);
rt_kprintf("pin:%d,value:%d,\n",pin,value);
if ((strcmp("pa", argv[1]) == 0) || (strcmp("PA", argv[1]) == 0))
{
if (strcmp("-w", argv[2]) == 0)
{
if(value == 1)
{
PA_HIGH(pin);
rt_kprintf("PA%d set high\n",pin);
}
else if(value == 0)
{
PA_LOW(pin);
rt_kprintf("PA%d set low\n",pin);
}
else
{
PA_TOGGLE(pin);
rt_kprintf("PA%d toggle\n",pin);
}
}
else if (strcmp("-r", argv[2]) == 0)
{
if(PA_VALUE(pin))
rt_kprintf("PA%d is high, %x\n",pin,PA_VALUE(pin));
else
rt_kprintf("PA%d is low, %x\n",pin,PA_VALUE(pin));
}
else if (strcmp("-init", argv[2]) == 0)
{
if(value == 0)
{
PA_INIT(pin,GPIO_MODE_INPUT);
rt_kprintf("PA%d INIT set input\n",pin);
}
else
{
PA_INIT(pin,GPIO_MODE_OUTPUT);
rt_kprintf("PA%d INIT set output\n",pin);
}
}
}
#ifndef SF32LB52X
else if ((strcmp("pb", argv[1]) == 0) || (strcmp("PB", argv[1]) == 0))
{
if (strcmp("-w", argv[2]) == 0)
{
if(value == 1)
{
PB_HIGH(pin);
rt_kprintf("PB%d set high\n",pin);
}
else if(value == 0)
{
PB_LOW(pin);
rt_kprintf("PB%d set low\n",pin);
}
else
{
PB_TOGGLE(pin);
rt_kprintf("PA%d toggle\n",pin);
}
}
else if (strcmp("-r", argv[2]) == 0)
{
if(PB_VALUE(pin))
rt_kprintf("PB%d is high, %x\n",pin,PB_VALUE(pin));
else
rt_kprintf("PB%d is low, %x\n",pin,PB_VALUE(pin));
}
else if (strcmp("-init", argv[2]) == 0)
{
if(value == 0)
{
PB_INIT(pin,GPIO_MODE_INPUT);
rt_kprintf("PB%d INIT set input\n",pin);
}
else
{
PB_INIT(pin,GPIO_MODE_OUTPUT);
rt_kprintf("PB%d INIT set output\n",pin);
}
}
}
#endif
}
else
{
rt_kprintf("example:\npin_test pa -init 29 0 #set PA29 to input \n");
rt_kprintf("pin_test pa -init 29 1 #set PA29 to output\n");
rt_kprintf("pin_test pa -w 29 1 #write PA29 to high level\n");
rt_kprintf("pin_test pa -w 29 0 #write PA29 to low level\n");
rt_kprintf("pin_test pa -r 29 #read PA29\n");
rt_kprintf("pin_test pb -init 29 1 #set PB29 to output\n");
}
return 0;
}
MSH_CMD_EXPORT(pin_test, forward pin_test command); /* 导出到 msh 命令列表中 */
#endif
调用方法:
PA_INIT(29,GPIO_MODE_OUTPUT); //PA29初始化为输出口
PA_HIGH(29);//PA29输出高
PA_TOGGLE(29);//PA29电平翻转
PA_INIT(33,GPIO_MODE_INPUT);//PA33配置为输入口
uint8_t value = PA_VALUE(33);//读取PA33,值非0代表高,0代表低电平
PB_INIT(2,GPIO_MODE_OUTPUT); //PB02初始化为输出口
1.1.4 GPIO调试方法¶
方法1:
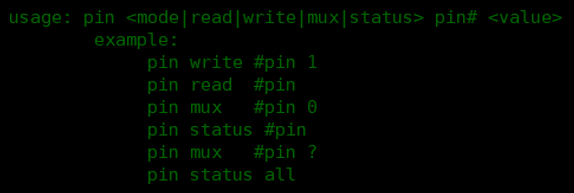
采用串口finsh命令,对应实现函数为:int cmd_pin(int argc, char **argv)Hcpu/Lcpu打开finsh功能后(Hcpu默认已打开),在串口console平台, 可以采用pin命令行来查看gpio状态,让GPIO输出高或低电平,比如:
pin //查看命令提示
pin status all //查看所有GPIO状态.
pin status 120 //查看120-96=24 PB24的状态41
pin mode 120 0 //设置PB24为输出mode
pin write 78 1 //设置PA78输出高
pin mux 106 2 //设置106-96=10 PB10为功能2 I2C4_SDA功能
pin status 160 //160-160=0 获取PBR0状态
方法2:
采用Ozone,Jlink等工具连到MCU,读取pinmux和gpio寄存器,跟用户手册对比,是否配置正确;pinmux寄存器地址对应方法:
register.h中PA口对应PINMUX1_BASE或hwp_pinmux1,PB口对应PINMUX2_BASE或者hwp_pinmux2,
例如PA03的pinmux寄存器地址为:hwp_pinmux1->PAD_PA03gpio寄存器地址对应方法:
PA口GPIO1_BASE或hwp_gpio1,PB口对应GPIO2_BASE或hwp_gpio2PBR口IO(PBR) 的输入使能、输出使能、上下拉电阻等功能可以通过 RTC 的 PBRxR 寄存器配置,比如PBR0地址为hwp_rtc->BKP0R
1.2 55X系列 PA口在睡眠唤醒后会有电平波动¶
HCPU PA口睡眠唤醒后会先恢复到芯片默认的上下拉,如下图: <br>
这个时候用户程序还没有跑起来, 然后再执行代码pinmux.c文件BSP_IO_Init里面设置的值,
所以HCPU GPIO如果睡眠的时候电平与默认上下拉不一致,唤醒后有可能存在10ms左右的跳变;
LCPU PB口睡眠唤醒后,唤醒前的值可以一直保存到BSP_IO_Init函数执行,所以只要在BSP_IO_Init设置好GPIO口状态,LCPU GPIO 的值睡眠是可以保持的.
比如 PA03你想开机后一直保持高电平,但由于PA03默认是下拉的,所以睡眠唤醒后会有10ms左右的低电平,再实际使用中,你需要找个默认是上拉的脚来替换PA03,比如PA10.
备注:
56X,52X系列PA口不存在此问题
1.3 TP的驱动 IRQ中断怎么配置¶
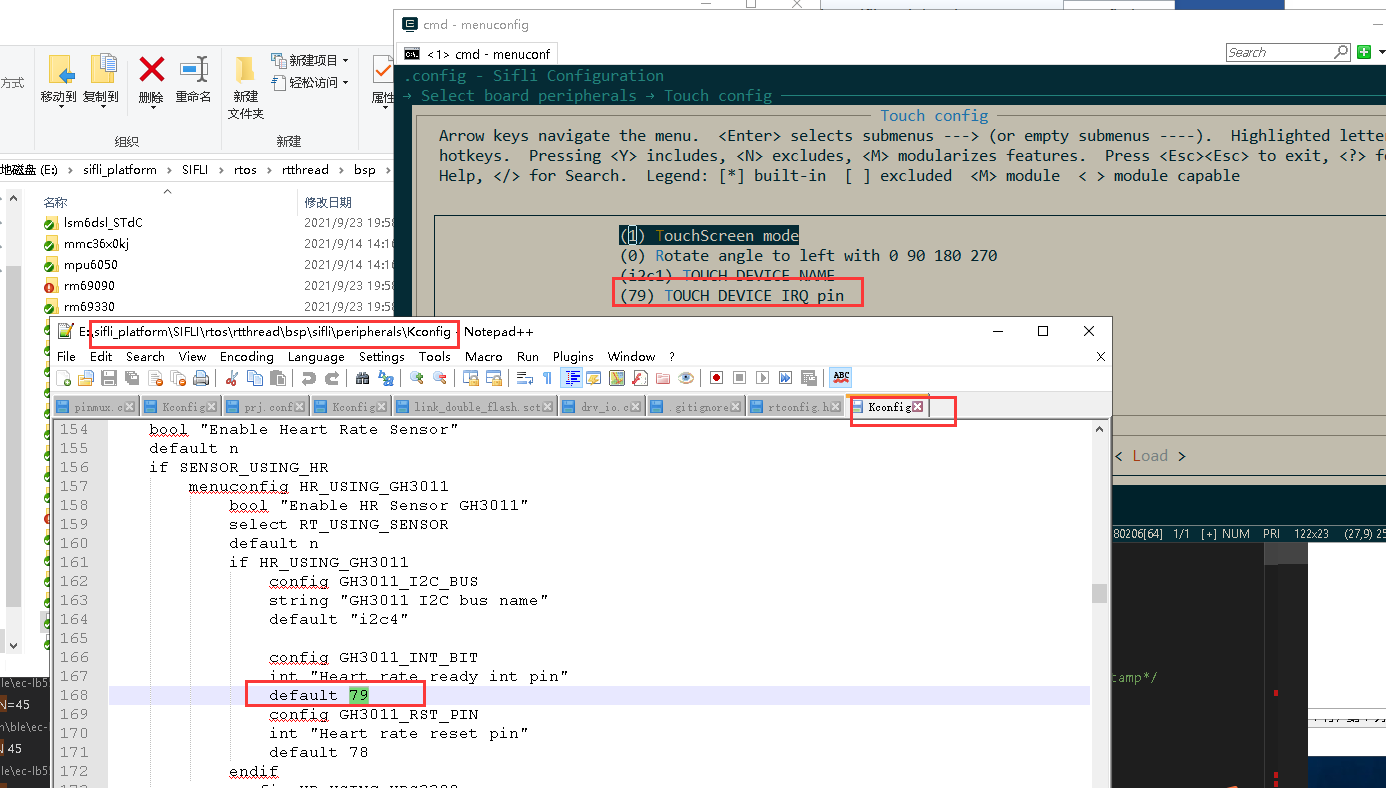
1,Menuconfig配置
配置完, 会在rtconfig.h中生成:
#define TOUCH_IRQ_PIN 79
2,pinmux.c中,需要确认该IO口的模式和上下拉状态:
HAL_PIN_Set(PAD_PA79, GPIO_A79, PIN_NOPULL, 1); // GPIO模式,无上拉,
3,在drv_touch.c会用到该定义,驱动可以直接使用drv_touch.c中两个函数:
rt_touch_irq_pin_attach(PIN_IRQ_MODE_FALLING, cst816_irq_handler, NULL);
rt_touch_irq_pin_enable(1);
或者自己在初始化函数中定义该中断:
rt_pin_mode(TOUCH_IRQ_PIN, PIN_MODE_INPUT); //配置为input
rt_pin_attach_irq(TOUCH_IRQ_PIN, PIN_IRQ_MODE_FALLING, (void *) cst816_irq_handler,(void *)(rt_uint32_t)TOUCH_IRQ_PIN);//配置下降沿中断和中断回调函数
rt_pin_irq_enable(TOUCH_IRQ_PIN, 1); //使能中断
4,Hcpu的串口输入命令:pin status 79 确认该配置是否正确。
1.4 如何detach touch irq¶
在touch驱动deinit函数中,在detach irq之前,需要先关闭该pin的中断:
static rt_err_t deinit(void)
{
rt_pin_irq_enable(TOUCH_IRQ_PIN, 0); //disable irq
rt_pin_detach_irq(TOUCH_IRQ_PIN);
...
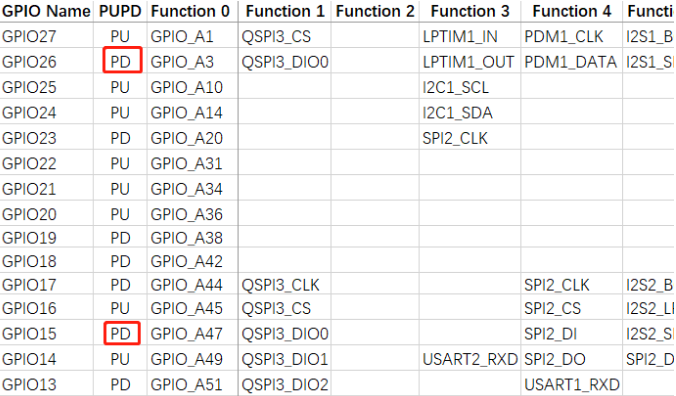
1.5 为什么PA55口为默认下拉口PD,但是上电我不做任何操作,PA55测试为高电平?¶
根本原因: 客户的OTA代码中, 有对PA55进行拉高操作.
让客户在用户程序pinmux.c中,添加__asm("B .");断点命令,
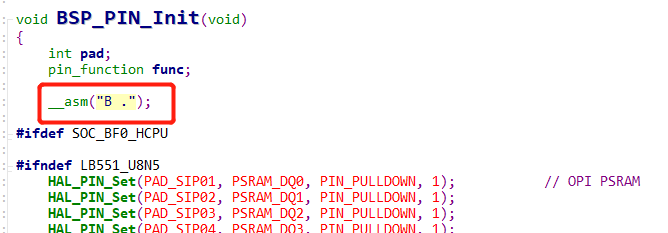
测试PA55口,为高,
mem32 0x50000038 20 读了相应的寄存器,有输出高的操作,
jlink输入r,让芯片复位,
在读寄存器值恢复正常, PA55电平也正常,
由于用户程序是从0x10060000开始跑的, 复位后 是从0x10020000 OTA的代码开始跑, 然后跳到用户的0x1006000的代码, 而OTA代码drv_io.c中操作了,PA55,导致该现象.
1.6 55系列MCU复用USB的PA01/PA03漏电风险¶
通常情况下,建议客户不使用PA01,
由于PA01,PA03是复用USB口功能, PA01,PA03当作GPIO使用时, 要特别谨慎;
1, PA01内部在active,light_sleep模式下存在18K的下拉电阻,输出高电平,否则存在漏电,standby,deep_sleep模式下18k下拉电阻不生效.
2,在standby模式下, PA01,PA03输出电平不一致, 会出现通过USB电路,出现漏电流,
具体而言,当满足以下条件时会存在漏电约20uA:
a,进入standby睡眠
b,PA01和PA03配置电平不一致(其中一个输出高或上拉,另一个输出低或下拉)。该漏电大小是不确定的值,可能随板子或环境变化有差异。
c,消除漏电的补丁方案:当进入睡眠时,使两个IO的电平一致,或至少将其中一个置为高阻状态(无上下拉)。
d,细节上有一些补充:1. PA01的下拉电阻在standby和deep_sleep模式下反而不会漏电,是在active或light_sleep的时候才漏 2. 高阻不仅是我们的配置,也要板子上没有上下拉,
可以采用下面方式输出高阻态:
HAL_PIN_Set_Analog(PAD_PA01,1); /* 模拟输入为Func10,关断GPIO输出,输入使能IE关闭,即为高阻态 */
HAL_PIN_Set_Analog(PAD_PA03,1);
1.7 55系列MCU-PB47/PB48配置32768时钟输出¶
使用前,需确认MCU这边贴了32768晶体,并关闭了#define LXT_DISABLE 1
另外需要修改两点:
1,使能标志位,以PB47为例:
#define LPSYS_AON_DBGMUX_PB47_SEL_LPCLK (0x1UL << LPSYS_AON_DBGMUX_PB47_SEL_Pos)
MODIFY_REG(hwp_lpsys_aon->DBGMUX,LPSYS_AON_DBGMUX_PB47_SEL_Msk,LPSYS_AON_DBGMUX_PB47_SEL_LPCLK);
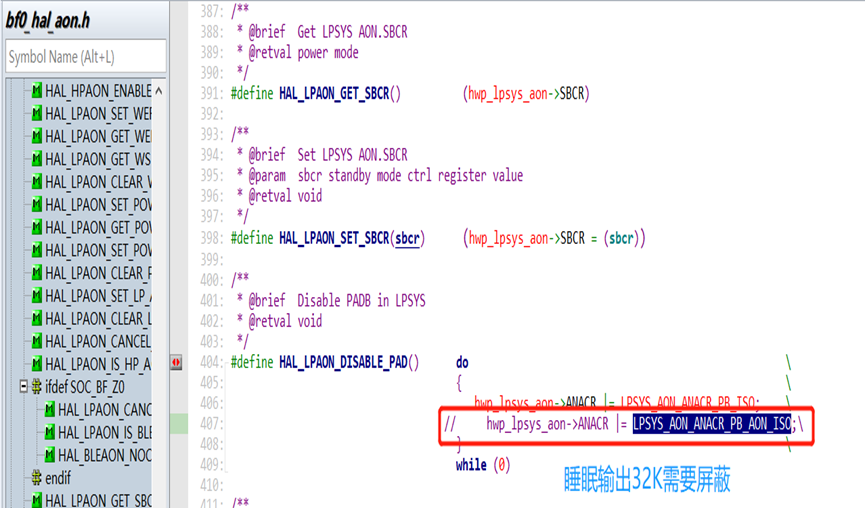
2,如果需要睡眠的时候保持32k输出,需要屏蔽如下截图部分。
因为如果LPSYS_AON_ANACR_PB_AON_ISO置1,唤醒管脚PB43~PB48睡眠时就能保持电平,但代价就是不能输出32k或者lptim3控制的波形。屏蔽后PB43~PB48这几个唤醒管脚睡眠期间不能保持电平,所以不能用作GPIO输出管脚
3,需要注意:
因为步骤2,PB为了输出32k关闭了standy下IO保持功能, 因此PB口的唤醒脚PB43-48在standby模式下,由于内部上下拉不再生效,外部要必须给确定电平或者视外部连接设为输出高或者低,防止standby模式下PB43-PB48漏电。
1.8 增加PB25为按键KEY2¶
1,Lcpu中 menuconfig → Sifli middleware → Enable button library 设置按键个数为2
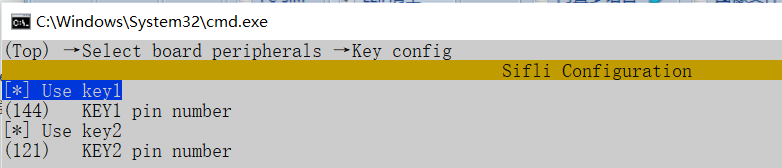
2,Lcpu中 menuconfig → Select board peripherals → Key config 设置KEY2对应GPIO为121(96+25)
3,Lcpu中 menuconfig → Sifli middleware → Enable button library 设置按键个数为2
4,Lcpu中 menuconfig → Select board peripherals → Key config 设置KEY2对应GPIO为121(96+25)
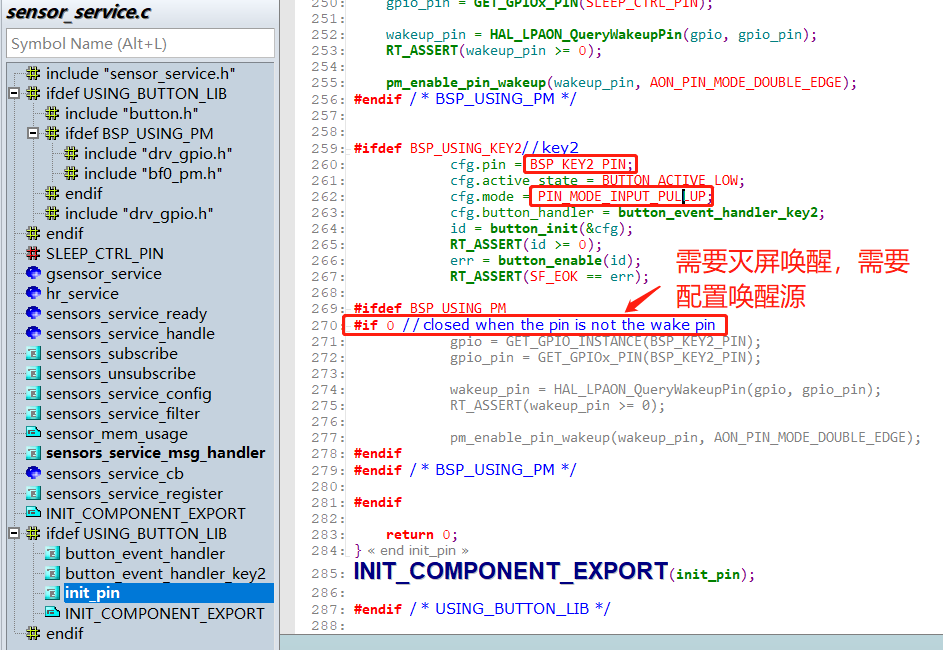
5,Lcpu中,在sensor_service.c 函数init_pin中配置KEY2的初始化和唤醒源
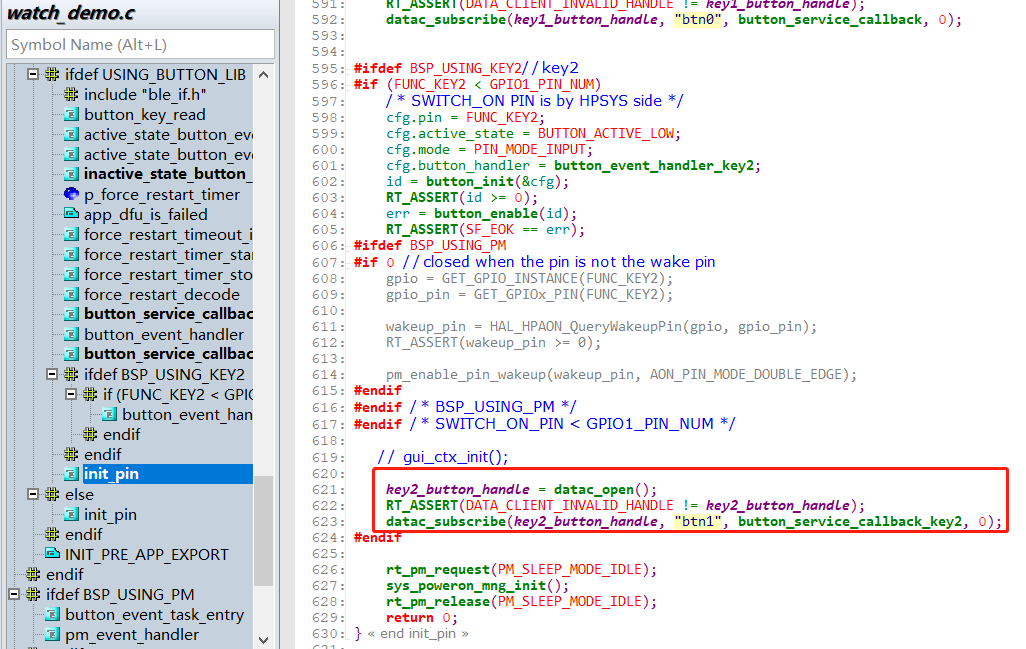
6,Hcpu中,在watch_demo.c函数init_pin中配置KEY2的消息订阅
1.9 提高GPIO驱动能力¶
DS0,DS1位都置1,驱动能力最强
HAL_PIN_Set_DS0(PAD_PA10,1,1); //PA10 DS0置1
HAL_PIN_Set_DS1(PAD_PA10,1,1); //PA10 DS1置1
HAL_PIN_Set_DS1(PAD_PB16,0,1); //PB16 DS1置1
1.10 GPIO配置为高阻模式¶
如下,设置该IO为模拟输入态,该IO口对外即为高阻态
HAL_PIN_Set_Analog(PAD_PA17, 1); //PA17 设置为模拟输入,对外高阻
HAL_PIN_Set_Analog(PAD_PB27, 0); //PB27 设置为模拟输入,对外高阻
从高阻态恢复为原IO状态,如下:
HAL_PIN_Set(PAD_PA17, GPIO_A17, PIN_NOPULL, 1);
HAL_PIN_Set(PAD_PB27, GPIO_B27, PIN_NOPULL, 0);
HAL_PIN_SetMode(PAD_PA17, 1, PIN_DIGITAL_IO_PULLDOWN); //sdk版本v2.2.0后,不再需要
HAL_PIN_SetMode(PAD_PB27, 0, PIN_DIGITAL_IO_PULLUP); //sdk版本v2.2.0后,不再需要
HAL_PIN_Set_Analog会把IO的IE位置0,如果只调用的HAL_PIN_Set函数配置,该函数不会操作IE位,此时输入不能用,需要IO恢复成输入口使用,还需调用HAL_PIN_SetMode函数配置,把IE为恢复为1(sdk版本v2.2.0后,不再需要)。
注意:
sdk版本v2.2.0后,在HAL_PIN_Set函数中,已经添加IE恢复为1操作,不需要再多添加HAL_PIN_SetMode函数
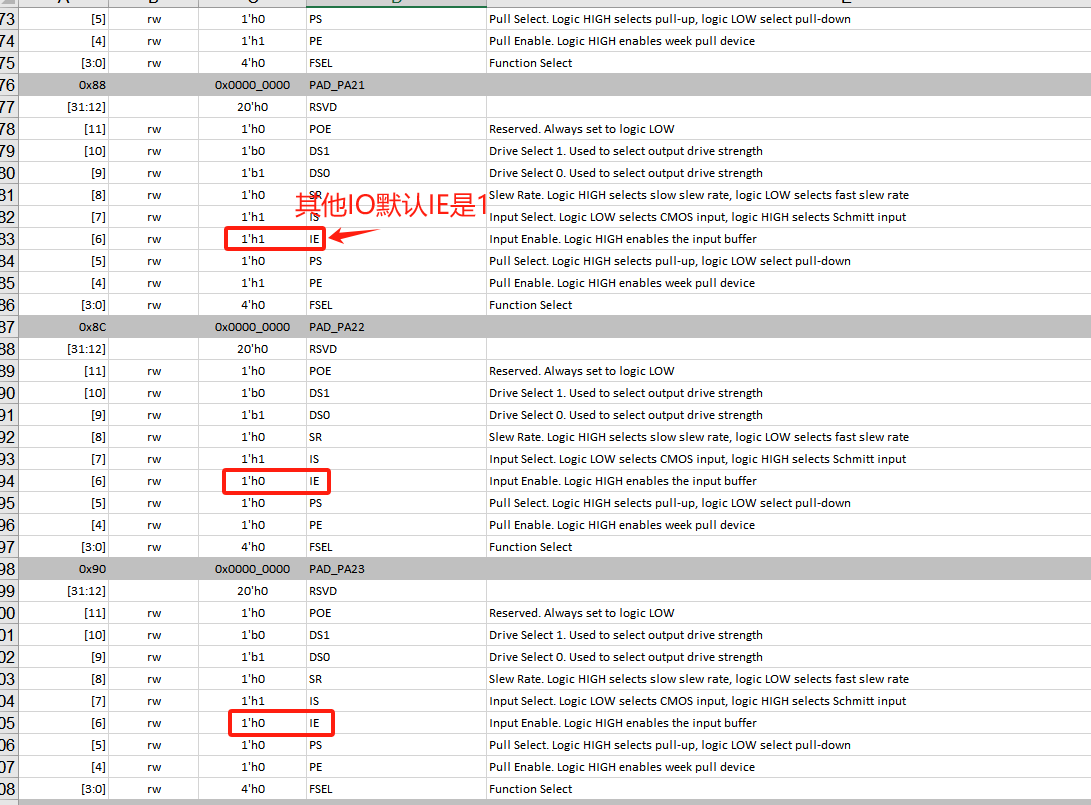
1.11 52X PA22/PA23 32K晶体复用IO, I2C无法输出波形问题¶
原因:
52X,其他IO的IE默认是1,而32k的两个IO是IE为默认为0,
默认的流程,HAL_PIN_Set函数,不会把IE置1,而PA22,23这两个IO,而默认IE是0,所以不能输出波形
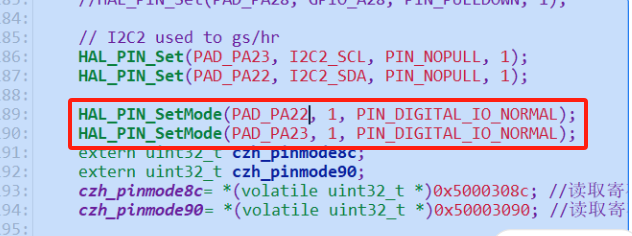
解决方法:
添加HAL_PIN_SetMode函数把IO设置为正常IO后,IE位会置1,I2C可以正常输出。
注意:
56X的PA55,PA56两个32K IO的IE位默认位1,不存在此问题。
sdk版本v2.2.0后,在HAL_PIN_Set函数中,已经添加IE恢复为1操作,不需要再多添加HAL_PIN_SetMode函数
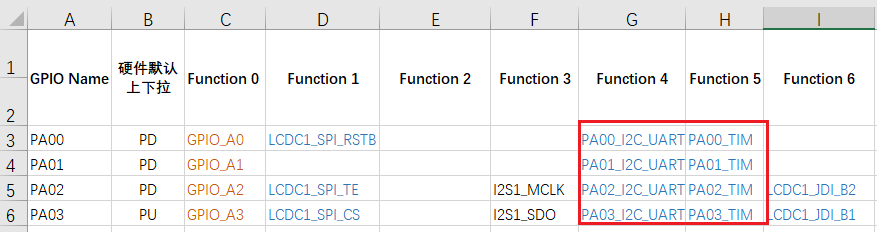
1.12 PAXX_I2C_UART和PAXX_TIM配置方法¶
55,58系列MCU,每个IO都是固定的I2C,UART,PWM输出口,从56,52系列后的MCU,为了增加IO的灵活性,如下图,变成了灵活配置:
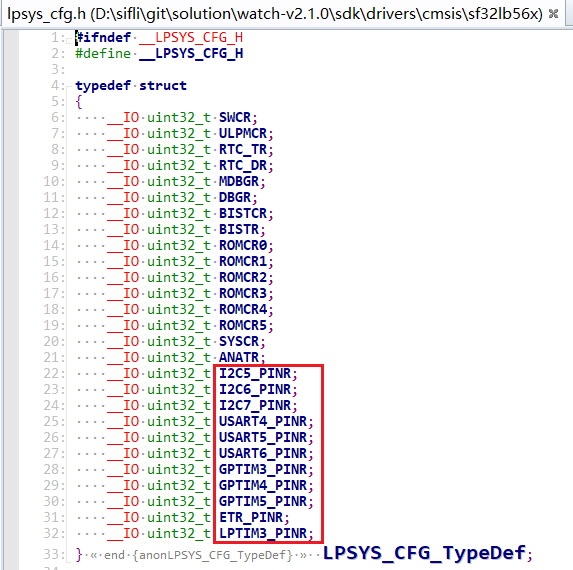
因为在HPSYS_CFG,LPSYS_CFG引入了I2CX_PINR,USART1_PINR,GPTIMX_PINR寄存器,如下图:

如上图寄存器内描述:对应的I2C1,I2C2都可以配置到PA00-PA78上来输出,具体PA口可以配置哪几路I2C,UART,TIMER输出,取决于HCPU拥有哪几路I2C,UART和TIMER,注意不能把LCPU才拥有的(例如I2C5,UART5)配置到PA口,同理不能把HCPU才拥有的(例如I2C1,UART1)配置到LCPU的PB口上,详细HCPU拥有哪几路资源,可以查看芯片用户手册,代码中hpsys_cfg.h中HPSYS_CFG_TypeDef,lpsys_cfg.h中LPSYS_CFG_TypeDef,都可以查看到对应的寄存器,另外bf0_pin_const.h文件中MCU可以配置的功能都有列出,如下图:
例如,正确的配置(举例为56系列MCU):
HAL_PIN_Set(PAD_PA32, USART1_RXD, PIN_PULLUP, 1);
HAL_PIN_Set(PAD_PA32, I2C1_SCL, PIN_PULLUP, 1);
HAL_PIN_Set(PAD_PA42, GPTIM2_CH4, PIN_NOPULL, 1);//GPTIM2_CH1-GPTIM2_CH4都可以,GPTIM2_CH5不行,因为没有此配置,详情查看对应芯片手册的寄存器:hwp_hpsys_cfg->GPTIM2_PINR
错误的配置:
HAL_PIN_Set(PAD_PA42,USART4_TXD,PIN_NOPULL, 1);//错误,UART4在Lcpu上,不能配置到Hcpu的PA口
HAL_PIN_Set(PAD_PB37,GPTIM2_CH4,PIN_NOPULL, 0);//错误,GPTIM2在Hcpu上,不能配置到Lcpu的PB口