SF32LB52X启动与低功耗流程¶
1 应用程序启动流程¶
SF32LB52X为双核芯片,有内置和外置多个存储接口,MPI1为内置存储接口,可接PSRAM与NOR Flash,MPI2和SDMMC为外置存储,MPI2可接NOR/PSRAM/NAND,SDMMC可接SD-NAND或SD-eMMC。应用程序运行在大核,蓝牙Controller协议栈运行在小核,小核不对用户开放,小核的启动由大核的蓝牙Host协议栈控制,用户无需关心。
大核上的应用程序启动流程分为三个阶段:
一级Bootloader:固化在SF32LB52X内部的ROM中,加载Flash中的二级Bootloader到RAM中跳转运行
二级Bootloader:加载Flash中的应用程序并跳转执行
应用程序:用户程序
1.1 一级Bootloader¶
一级Bootloader固化在了芯片的ROM中,其中断向量表地址为0。上电后会首先运行一级Bootloader,根据芯片封装类型,确定Flash分区表的位置(内部或者外部Flash,下文称为启动Flash),根据Flash分区表指示的二级Bootloader地址(必须在启动Flash上),拷贝二级Bootloader代码到RAM中并跳转运行。
一级Bootloader阶段大核以上电默认的时钟频率运行,初始化启动Flash的IO配置。
1.2 二级Bootloader¶
二级Bootloader根据芯片封装类型以及Flash分区表,加载应用程序并跳转执行。根据芯片封装类型,应用程序分为以下几种启动方式,运行方式分为XIP(直接以NOR Flash地址执行代码,代码的存储地址与执行地址相同)和非XIP(从Flash拷贝代码到RAM中执行,即代码的存储地址与执行地址不同)两种,不论是哪种启动方式,应用程序与二级Bootloader均存放在同一个启动Flash上,区别只是应用程序代码的运行方式不同:
内置NOR Flash(MPI1):启动Flash为内置NOR Flash,应用程序存储在内置NOR Flash上,以XIP方式运行
无内置NOR Flash:
a. 外置NOR Flash(MPI2):启动Flash为外置NOR Flash,应用程序存储在外置NOR Flash上,以XIP方式运行
b. 内置PSRAM(MPI1),外置NAND Flash(MPI2):启动Flash为外置NAND Flash,应用程序存储在外置NAND Flash上,非XIP执行,即代码被拷贝到内置PSRAM执行
c. 内置PSRAM,外置SD Flash(SDIO):同 b)
对于有内置PSRAM的封装类型,二级bootloader会打开LDO1V8并初始化PSRAM。
二级Bootloader会修改默认的时钟配置,具体见下表
模块 |
时钟源 |
频率(MHz) |
|---|---|---|
DLL1 |
/ |
144MHz |
DLL2 |
/ |
288MHz |
大核系统时钟 |
DLL1 |
144MHz |
内置NOR Flash |
系统时钟 |
48MHz |
内置PSRAM |
DLL2 |
144MHz |
外置Flash |
DLL2 |
48MHz |
外置SD |
DLL2 |
|
PMU |
默认值 |
|
MPU |
Disabled |
|
Cache |
Disabled |
二级Bootloader不加载PMU的校准参数,仅修改所使用的存储相关的IO设置。
Cache未使能,MPU未使能
1.3 应用程序¶
应用程序的入口函数为ResetHandler(位于drivers\cmsis\sf32lb52x\Templates\arm\startup_bf0_hcpu.S),其执行流程如图1所示,用户主函数main则由rt_application_init创建的main线程调用,见图5 main_thread_entry流程。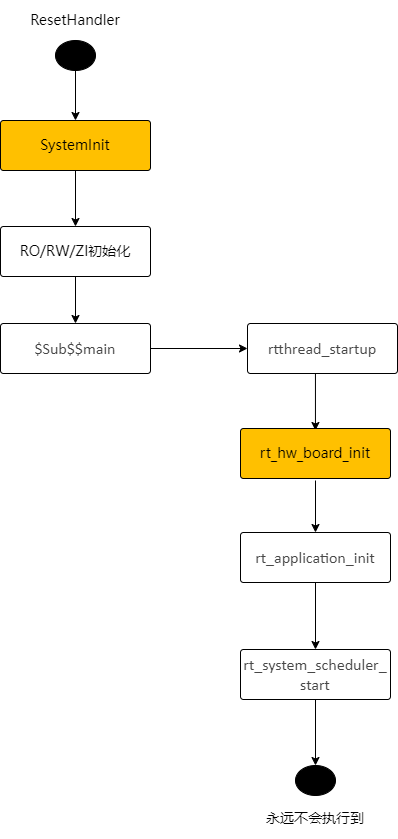
Figure 1 ResetHandler流程
SystemInit(drivers/cmsis/sf32lb52x/Templates/system_bf0_ap.c)在变量初始化之前执行(因此这期间不能使用带初值的变量,零段变量也要避免依赖于初值0),更新VTOR寄存器重定向中断向量表,调用mpu_config和cache_enable初始化MPU并使能Cache,这两个函数为weak函数,应用程序中可以重新实现来替换默认的实现。
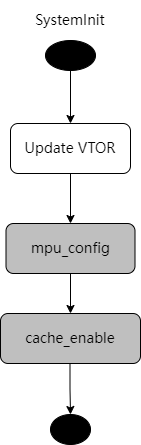
Figure 2 SystemInit流程
rt_hw_board_init完成底层硬件初始化,例如时钟和IO配置,PSRAM和NOR Flash初始化,heap和串口console的初始化。rt_component_board_init是应用程序自定义的初始化函数,随应用程序配置的不同而调用不同的函数。

Figure 3 rt_hw_board_init流程
HAL_Init完成HAL初始化,加载PMU的校准参数,更新时钟、IO设置, 初始化PSRAM和NOR Flash(根据新的时钟配置),下图中绿色函数为板级驱动函数,每个板子有独立的实现,包括HAL_PreInit、BSP_IO_Init、BSP_PIN_Init和BSP_Power_Up等,灰色函数为虚函数,由应用程序实现,独立于板子,目的是相同板子不同的应用程序可以有自定义的实现,比如不同应用程序在同一块板子上使用不同的IO配置。图4流程图中横向为函数内的嵌套调用子函数,比如HAL_PreInit调用了时钟配置的函数,HAL_MspInit调用BSP_IO_Init,纵向为串行执行的几个函数,如HAL_PreInit执行完再执行HAL_PostMspInit。
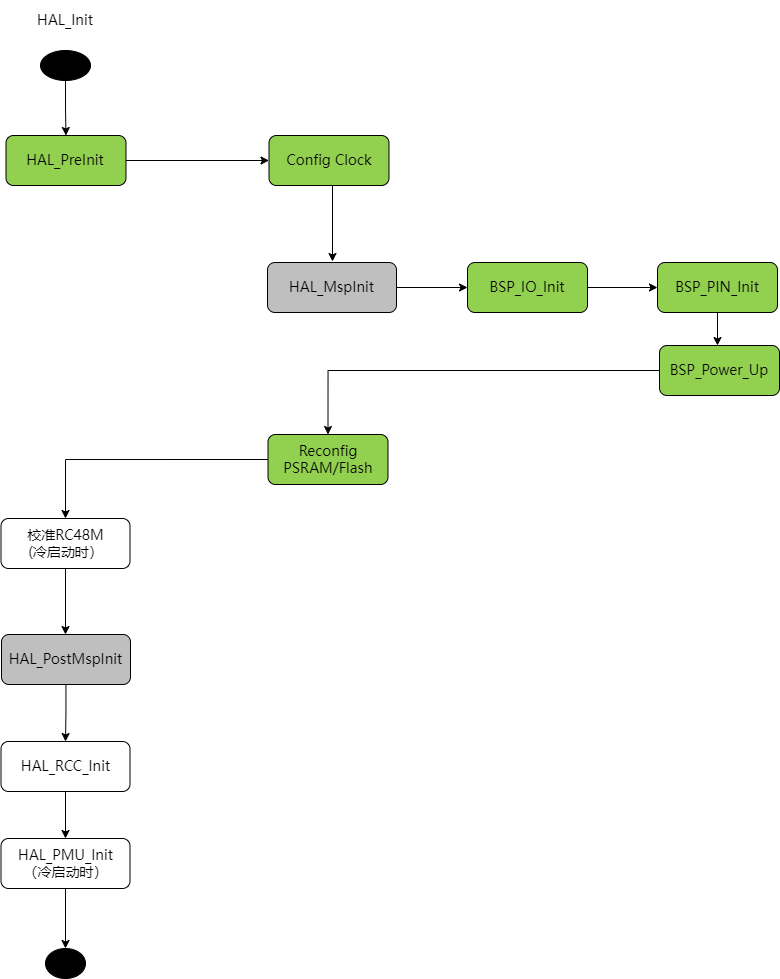
Figure 4 HAL_Init流程
Config Clock修改的设置包括:
加载PMU校准值
启动GTimer
切换PMU到RC32K
如果使用外置XT32K,则切换RTC到XT32K
配置系统时钟为240MHz(DLL1)
配置DLL2为288MHz(与二级bootloader的设置相同)
加载的PMU校准值包括:
BUCK_CR1_BG_BUF_VOS_POLAR
BUCK_CR1_BG_BUF_VOS_TRIM
LPSYS_VOUT_VOUT
VRET_CR_TRIM
PERI_LDO_LDO18_VREF_SEL
PERI_LDO_LDO33_LDO2_SET_VOUT
PERI_LDO_LDO33_LDO3_SET_VOUT
AON_BG_BUF_VOS_POLAR
AON_BG_BUF_VOS_TRIM
HXT_CR1_CBANK_SEL(小米分支新增,之前是在rt_component_board_init阶段) 加载校准值的代码可能运行在Flash或PSRAM上。
HAL_PMU_Init初始化的PMU参数见下图

rt_application_init中创建main线程,线程入口函数为main_thread_entry,当放开线程调度后(即调用rt_system_scheduler_start之后),main线程得到调度,进入main_thread_entry函数,先调用rt_components_init初始化组件,随后即调用main函数(应用程序实现),用户代码即从main函数开始,比如rt_driver示例的主函数在example/rt_driver/src/main.c中。
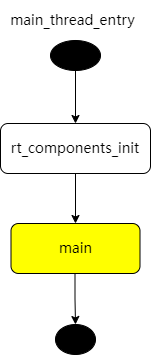
Figure 5 main_thread_entry流程
对于使用外置NOR的SF32LB523手表方案,可以认为存在两个应用程序,一个是OTA Manager,另一个是User App,二级bootloader先跳转到OTA Manager执行完上述的应用程序启动流程,再跳转到User App中再执行一遍相同的启动流程,区别是一些应用程序自定义的模块初始化会有所不同
1.4 板级驱动接口¶
每块板子需要实现如下板级驱动函数,可参考customer/boards/eh-lb52xu,
函数名 |
必选 |
说明 |
|---|---|---|
HAL_PreInit |
YES |
建议保持HDK的默认实现 |
BSP_Power_Up |
NO |
唤醒后调用 |
BSP_IO_Power_Down |
NO |
睡眠前调用 |
BSP_LCD_Reset |
NO |
|
BSP_LCD_PowerUp |
NO |
屏幕上电时调用 |
BSP_LCD_PowerDown |
NO |
屏幕断电时调用 |
BSP_TP_Reset |
NO |
|
BSP_TP_PowerUp |
NO |
触控上电时调用 |
BSP_TP_PowerDown |
NO |
触控断电时调用 |
HAL_MspInit |
NO |
应用程序 |
HAL_PostMspInit |
NO |
|
BSP_IO_Init |
NO(?) |
由HAL_MspInit决定是否调用,现在HAL_MspInit默认实现为空函数就,以后可以改成调用BSP_IO_Init,并且提供BSP_IO_Init的标准实现为依次调用BSP_IO_Init和BSP_Power_Up |
BSP_PIN_Init |
NO(?) |
由BSP_IO_Init调用,IO配置函数 |
1.5 应用程序自定义驱动接口¶
如果同一块板子的不同应用程序需要实现不同的HAL_MspInit功能,建议将HAL_MspInit的实现置于应用程序目录下,否则可以放在板子目录下。
函数名 |
必选 |
说明 |
|---|---|---|
HAL_MspInit |
NO |
|
HAL_PostMspInit |
NO |
2 低功耗流程¶
2.1 睡眠流程¶
建议使用deepsleep低功耗模式(睡眠模式),该模式下所有RAM数据和硬件配置都能保持,从睡眠模式回到工作状态所需的恢复时间也较短,睡眠期间IO电平可以保持在工作时的状态,但睡眠模式下外设停止工作,CPU只能被有限几个唤醒源唤醒,包括GPIO中断、RTC中断、LPTIM中断以及核间通信中断。对应用程序而言,睡眠模式与工作模式间的切换是透明的,是否进入睡眠模式由最低优先级的IDLE线程控制,当所有高优先级线程都没有任务执行,IDLE线程得到调度后,IDLE线程会检查是否满足睡眠条件,当满足以下所有条件后,即可进入睡眠模式:
没有禁止睡眠模式
操作系统最近一个将要超时的定时器时间大于门限,默认门限为100ms
不满足唤醒条件,比如使能了某个唤醒源,该唤醒源并未被激活
发送给小核的数据已被读走
进入睡眠模式前会根据操作系统最近一个定时器的超时时间启动LPTIM,LPTIM的中断时间设置为操作系统定时器的超时时间,比如最近一个定时器在200ms后超时,会把LPTIM配置成200ms后触发中断,即200ms后唤醒大核,因此即使进入了睡眠模式,应用程序仍旧可以按时醒来调用操作系统定时器超时函数。
应用程序使用rt_pm_request(PM_SLEEP_MODE_IDLE)禁止进入睡眠模式,直到调用rt_pm_release(PM_SLEEP_MODE_IDLE)释放请求。外设工作时,基于RT-Thread的驱动框架会自动调用rt_pm_request禁止睡眠,避免中断模式下误进入睡眠模式。
deepsleep模式默认的定时器门限为100ms(见下表,定义在bf0_pm.c中),可以使用rt_pm_policy_register注册自定义的策略表,其中thresh表示定时器门限,mode表示大于该门限后可以进入的睡眠模式。
RT_WEAK const pm_policy_t pm_policy[] =
{
#ifdef PM_STANDBY_ENABLE
#ifdef SOC_BF0_HCPU
{100, PM_SLEEP_MODE_STANDBY},
#else
{10, PM_SLEEP_MODE_STANDBY},
#endif /* SOC_BF0_HCPU */
#elif defined(PM_DEEP_ENABLE)
#ifdef SOC_BF0_HCPU
{100, PM_SLEEP_MODE_DEEP},
#else
{10, PM_SLEEP_MODE_DEEP},
#endif /* SOC_BF0_HCPU */
#else
#ifdef SOC_BF0_HCPU
{100, PM_SLEEP_MODE_LIGHT},
#else
{15, PM_SLEEP_MODE_LIGHT},
#endif /* SOC_BF0_HCPU */
#endif /* PM_STANDBY_ENABLE */
};
进入睡眠时如果有外设需要掉电降低功耗,可以在BSP_IO_Power_Down中修改配置,相应的可以在BSP_Power_Up中给外设上电,该函数在睡眠醒来后会被调用。
2.2 WFI自动降频¶
进入IDLE线程,但不满足睡眠条件时,大核可以通过降频来降低WFI期间的电流,降频的条件为高速外设不在工作,高速外设包括:
EPIC
EZIP
LCDC
USB
SD
检查EPIC/EZIP是否在工作并未置于HAL驱动中,而是集成在LVGL图形库中,如果没有使用SDK自带的LVGL实现,需要调用rt_pm_hw_device_start指示高速外设开始工作,避免降频执行WFI,外设结束工作后调用rt_pm_hw_device_stop。
LCDC/USB/SD是否工作的判断集成在了RT_Thread的LCD Device驱动中。
降频后的WFI频率由函数HAL_RCC_HCPU_SetDeepWFIDiv配置,需要注意当有音频外设在工作时,只能降频到48MHz,除此以外可以降频到4MHz,同时要把hwp_hpsys_rcc->DBGR的HPSYS_RCC_DBGR_FORCE_HP比特置1。
2.3 场景化动态调频¶
对于无需高性能计算的场景,大核还可以通过降频降压来降低工作功耗,比如手表灭屏后运行抬腕算法,可以将系统频率降到48MHz,虽然随着CPU频率变慢,算法执行时间也会变长,但总功耗(即电流与时间的乘积)仍旧会更低,可以实测不同运行模式的场景功耗,选择功耗最优的模式。
使用rt_pm_run_enter函数配置当前的运行模式,大核支持下表四个运行模式,推荐使用HIGH_SPEED和MEDIUM_SPEED两个模式。应用程序启动后默认工作在HIGH_SPEED模式。
往高速模式切换为立即生效,即当rt_pm_run_enter退出后已切换到高速模式,往低速模式切会延迟到IDLE线程完成,即退出函数后仍旧在原模式,需要等到IDLE得到调度后才会完成切换。
模式 |
系统时钟(MHz) |
|---|---|
PM_RUN_MODE_HIGH_SPEED |
240 |
PM_RUN_MODE_NORMAL_SPEED |
144 |
PM_RUN_MODE_MEDIUM_SPEED |
48 |
PM_RUN_MODE_LOW_SPEED |
24 |
SDK还提供了pm_scenario_start、pm_scenario_stop两个函数方便应用程序根据场景切换,目前支持的场景有UI和Audio,当UI或者Audio场景开启后,使用HIGH_SPEED模式,UI和Audio均为开启时,使用MEDIUM_SPEED模式。